手机网移动端
手机网移动端

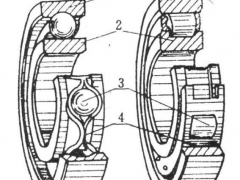
RV减速器是通过输入齿轮与正齿轮啮合带动曲柄轴旋转,曲柄轴在转动过程中带动摆线轮旋转,曲柄轴中间的2套保持组件起到支撑摆线轮的作用,曲柄轴两端的圆锥滚子轴承起到支承曲柄的作用,在支承凸缘被固定的情况下,摆线轮通过与针齿的啮合带动减速器外壳转动,在减速器外壳被固定的情况下,摆线轮通过与针齿啮合带动支承凸缘转动。
机器人用交叉滚子轴承的优点:
1、节省安装空间
交叉滚子轴承的内外环尺寸被小限度地小型化,特别是超薄结构是接近极限的小型尺寸,并且具有高刚性,所以适合于工业机器人的关节部位或者旋转部位、机械加工中心的旋转工作台、机械手旋转部、精密旋转工作台、医疗仪器、计量器具、IC制造装置等地方。
2、预承受较大的轴向和径向负荷
因为滚子在呈90°的V型沟槽滚动面上通过间隔保持器被相互垂直排列,这种设计使交叉滚子轴承就可以承受较大的径向负荷、轴向负荷及力矩负荷等所有方向的负荷。
3、工业机器人轴承径向和轴向尺寸都可以极限化,因此节约按照空间,可以使用在空间条件尺寸要求小的高精度、高刚性场合。
4、轴承可以很方便地装配于主轴的各个方向,可以通过标准化和系列化实现大批量生产,装配使用比较方便。